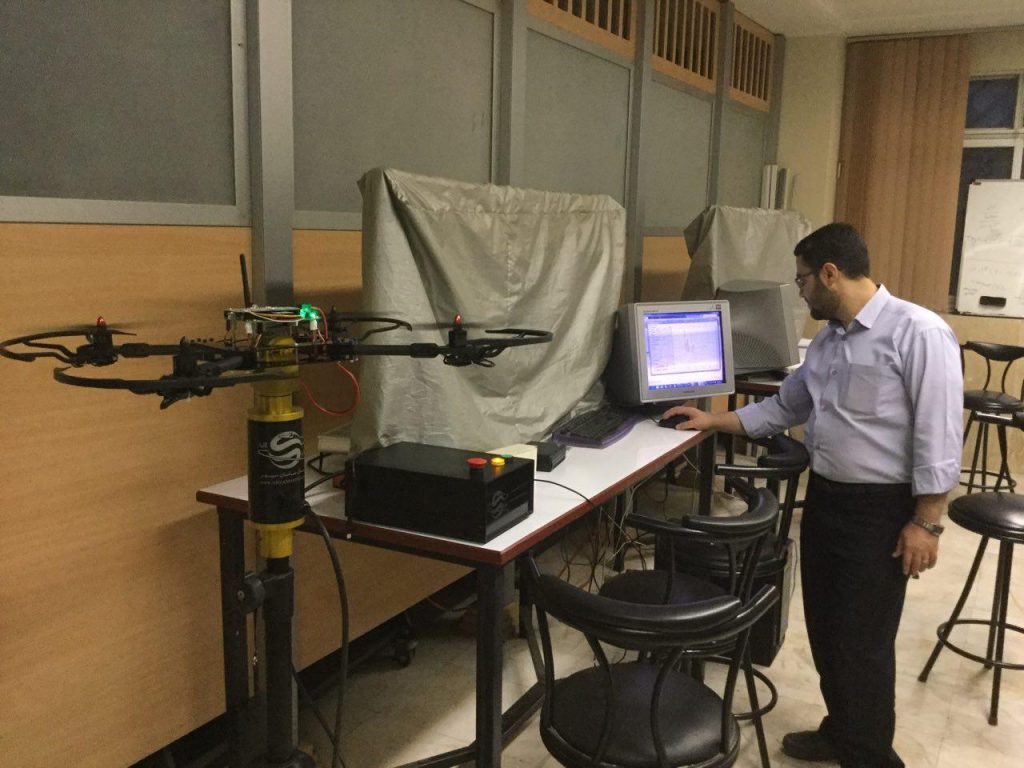
A 3 DOF quadcopter test stand setup is now ready to use in control lab of mechanical engineering department of Sharif university of technology. the specs of this test stand is as follow:
- 1,2 or 3 DOF testing
- Hardware In the Loop testing (HIL)
- Real-time data scoping in the PC
- Designing controller in Matlab-Simulink and implementation on the quadrotor
- Ready for researches on quadrotor controller design



{kind=link}
{kind=link}