


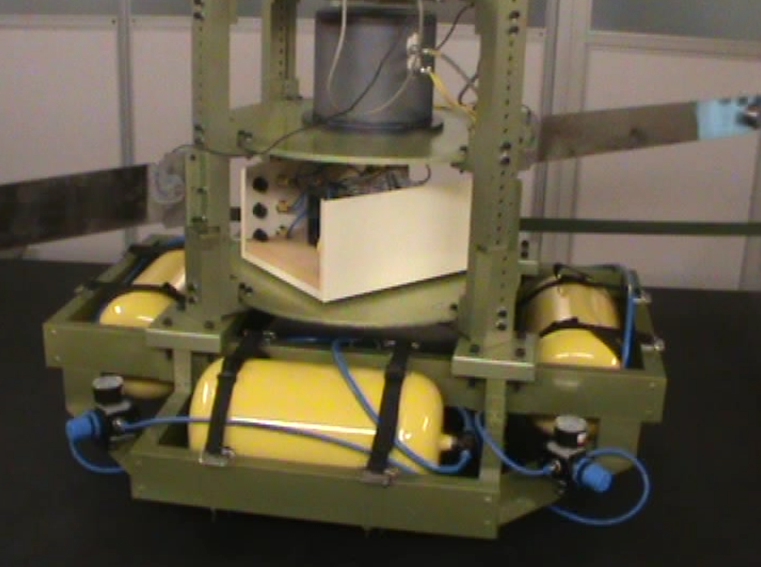




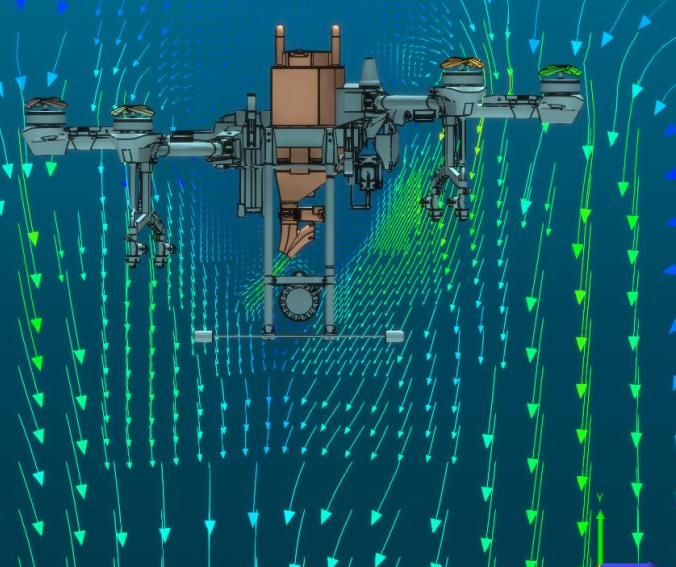
پایدارسازی کوادکوپتر در مانور کاهش ارتفاع
پرنده کوادروتور در هنگام کاهش ارتفاع در صورتی که سرعت کاعش ارتفاعش از یک حد خاصی بیشتر باشد، در یک محدوده ناپایدار به نام جریان حلقه گردابه قرار میگیرد. در این پژوهش هدف یافتن مسیری است که علاوه بر داشتن سرعت های بالا در کاهش ارتفاع، پرنده وارد محدوده ناپایدار نشود.


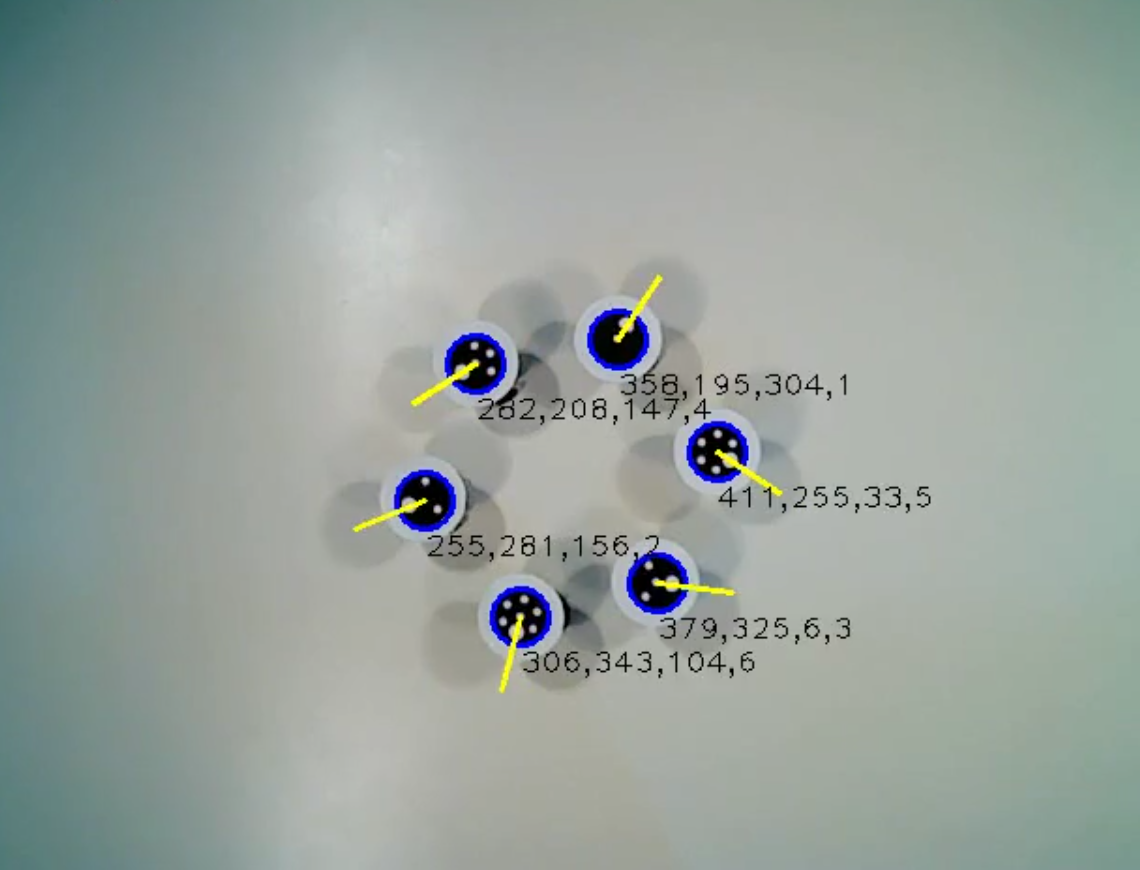
مساحت سنجی زمین های کشاورزی با استفاده از تصاویر هوایی به صورت در لحظه
با بهرهگیری از الگوریتم های شبکههای عصبی و با استفاده از تصاویر هوایی، زمینهای کشاورزی شناسایی شده و با توجه به اطلاعات مکان تصویربرداری نظیر ارتفاع و زوایای دوربین، چه در تصاویر عمودی و چه در تصاویر مایل و کج مساحت و سایر ابعاد مورد نظر بدست میآید.